bots Electronica motores vibradores robótica robots tutoriales de robotica Vibrabot

Cuando Dexter terminó de construir su gran imperio, gracias a la venta de paraguas de bambú, anunció su retiro absoluto del mundo de la electrónica para dedicarse de lleno a disfrutar de su mansión de oro puro y su auto cohete. Así que luego de que lloráramos como niñas chiquitas por varios días, nos dimos cuenta que alguien debía tomar su lugar.
Debido a nuestra imposibilidad de igualar su talento, hicimos una competencia de arco y flecha, pesca milagrosa y un torneo intercomunal de covers folcóricos en toc-toc para decidir quien lo sucedería. Así que hoy damos inicio a la que esperamos sea una serie de tutoriales en las que vayamos aprendiendo y descubriendo algunas cosas en conjunto.
Hoy partiremos construyendo un sencillo robot, el cual puede ser un buen proyecto para quienes recién estamos comenzando.
El detalle, como siempre, después del salto.
Como siempre, lo primero (y luego todo lo demás):

Algunas notas antes de partir, en caso de que existan dudas:
¿Qué es un portapilas?
Los portapilas o battery holders son contenedores (usualmente de plástico), que contienen espacios para montar pilas (hay versiones para cada tamaño de pilas disponibles) y que cuentan con cables o alambres de salida que permiten transmitir la energía emitida por estas pilas para ser traspasadas a otros dispositivos.
La gracia es que para dispositivos pequeños (como este “robot”) que no requieren de mucha potencia, podemos energizarlos con pilas sin la necesidad de hacer una conexión directa e insertarlos en el dispositivo, si no que solo uniendo los alambres entre el portapilas y el motor del dispositivo, ya sea soldándolos o con huincha aisladora.
¿Para qué usar un cepillo?
En este caso en particular lo utilizaremos como base del robot, para equilibrarlo y que se mantenga armado una vez que lo metamos en la estructura final, pero perfectamente podrían reemplazarlo por otra cosa de características similares. En esta instancia lo usamos porque era un implemento fácil de conseguir, reconocible y que teníamos a mano.
¿Y la bola de hamster?
Específicamente porque necesitamos una estructura redonda que pudiera girar una vez que el robot se activara adentro y esta fue fácil de conseguir. En caso de que no puedan, alguna pelota de plástico u otro material de tamaño similar (que al abrirla no se rompa) también sirve.
Con eso ya claro, vamos, ¡manos a la obra!
1.- Lo primero que haremos, y consideramos este paso como opcional en caso de que hayan elegido otra base, será cortar un poco el cepillo utilizando la sierra de mano, ya que su tamaño no permitirá meterlo dentro de la bola de hamster. Para eso partimos por cortar el mango:

2.- Una vez que le sacamos el mango, aún debemos cortar un poco más, ya que la longitud supera al agujero de la bola. Para ello hacemos una línea con el marcador para ver de que porte dejaremos la base del robot:

Y cortamos:


Un corte parejo (?)
3.- Ahora que tenemos la base lista, empezaremos a armar el motor y la conexión al portapilas, que es por donde partiremos, insertando las 2 pilas AAA:

Y lo tapamos.

En este caso, como el portapilas viene con un interruptor de encendido y apagado, no es necesario hacer nada, ya que solo lo activaremos después de realizadas las conexiones correspondientes.
Sin embargo, si el portapilas que tengan no viene con interruptor, pueden insertar un pequeño trozo de papel entre el contacto y una de las pilas para que no envíe nada, y después al momento de armar lo retiramos de ahí.
4.- Ahora hacemos la conexión entre el portapilas y el motor vibrador. Esto es bastante sencillo, solo debemos unir los cables que salen del motor vibrador con los que salen del portapilas: rojo con rojo y negro con negro y los aseguramos con huincha aisladora.

Antes de seguir, la gran pregunta:
¿Qué pasa si no hay cables rojos y negros en uno de los dos?
La verdad, da lo mismo en este caso. Por el tipo de corriente que se emite, en el caso de que conectemos los cables al revés funcionará igual, solo que el motor girará en sentido contrario, algo que no nos afectará en el objetivo final de este proyecto.
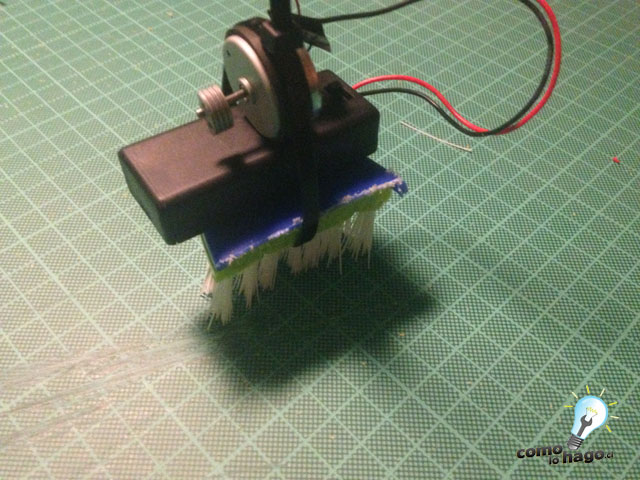
5.- Y ahora que tenemos las conexiones hechas, y la base cortada, es momento de armar el “núcleo” de nuestro robot. Para ello, montamos sobre el cepillo el portapilas y sobre este último el motor vibrador, uno encima del otro.
Para asegurar, utilizamos las tiras amarracables, que una vez ajustadas impedirán que las partes se suelten:


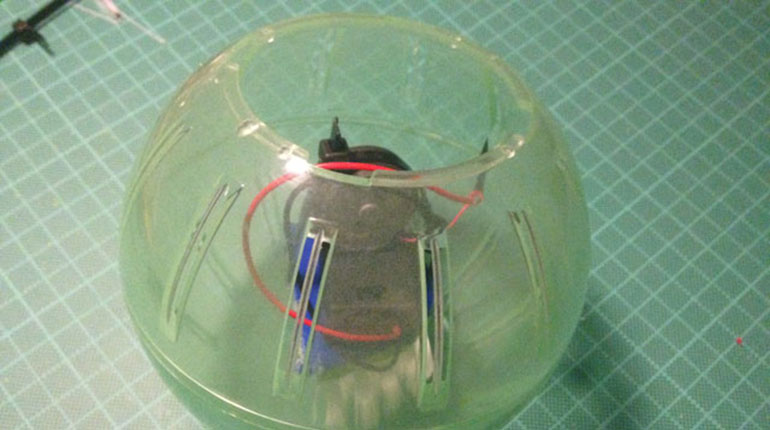
6.- Ahora, con todo armado, metemos dentro de la bola de hamster (como verán, cortamos el excedente de la tira amarracable):


7.- Ahora, con mucho cuidado, activamos el interruptor, tapamos la bola y la dejamos sobre alguna superficie para que empiece a vibrar y moverse, algo similar a lo que se ve a continuación:

¡Y listo!, con eso tenemos terminado y andando nuestro primer robot. Si bien no es glamoroso, ni dispara rayos por los ojos, es un buen comienzo para embarcarnos en esta nueva aventura y que terminemos construyendo nuestros propios Jaegers (?)
En próximos tutoriales iremos evolucionando un poco más estos modelos e incorporando otros elementos para ir experimentando.
Por ahora vamos cerrando recordándoles que si tienen alguna duda y/o comentario, pueden escribirnos en el área habilitada a continuación.
Y como siempre, que este tutorial ha sido creado, desarrollado y documentado por el equipo de CLH, por lo que cuenta con nuestro Sello de Garantía:

Esperamos que este tutorial haya sido de utilidad para uds.
¡Hasta la próxima!




Deja un comentario